Drift A Part
Robotic "Data" Vis
Comments / TL;DR:
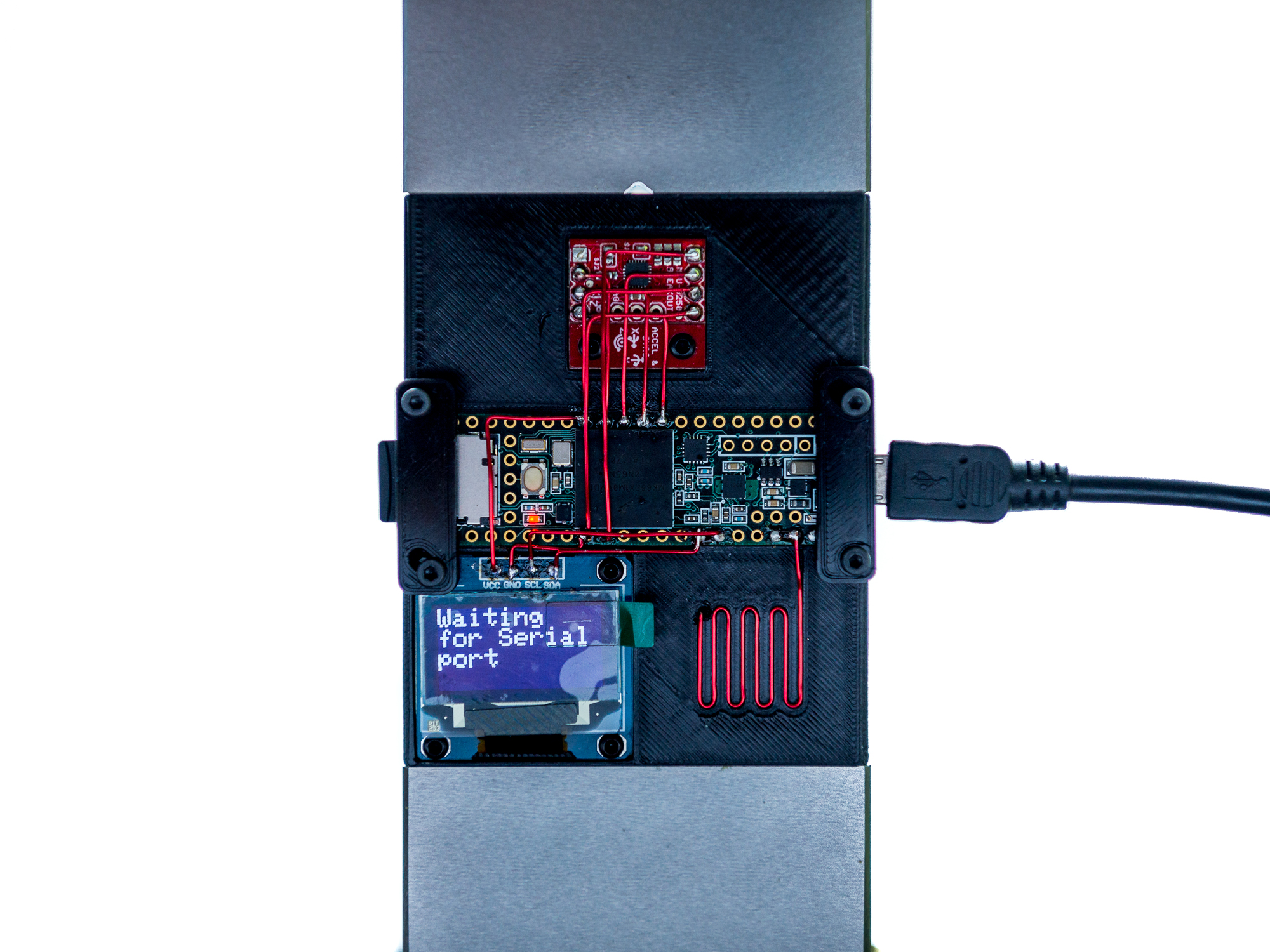
Conceptually, I was curious to explore “datalogging” from a static IMU (pure noise), and interesting ways of representing it (I thought of VR environments or 3D prints, but in the end I chose robotic light painting).
I used this project to get familiar with:
- Kuka Robots (Mechanical aspects, triggering the camera with it, triggering lights, etc)
- Kuka PRC on Grasshopper (Importing data, generating path, triggering robots I/Os)
- Python to treat datasets
Description:
Exploration of the difference between the real and the virtual (assumed) positions/characteristics of a thing due to noise in data assessment. This exploration was born from the desire to work with a part of data which we struggle a lot to get rid of: noise. During this constant struggle and maintenance, we do not necessarily realize how much noise we are removing.
By leaving only noise and integrating the noise into speed, and then into distance (as would be done with real “valuable” data), we can visualize how much we would believe the part traveled without proper “information maintenance”. This concept not only relates to sensors, but also to how we can erroneously or distortedly assess informations about people, the world, relationships. As we cannot integrate the error of an assessment of a person over time, we are left to use sensors as metaphors.
https://github.com/wes06/Drift-A-Part
Big Thanks for Prof. Johannes Braumann for the help!